Keyhan Kouhkiloui

Research Associate & Entrepreneurship Fellow
I am a highly motivated and experienced Research Associate (Post-doc) and Entrepreneurship Fellow at the University of Edinburgh, with a strong background in robotics and control systems. My research interests lie in developing advanced control strategies for robots in general to safely collaborate with humans in shared work environments. The ultimate goal of my research is to provide robots with the capability to move beyond their traditional industrial settings and work in more dynamic and interactive tasks that cannot be fully characterized a priori, such as human-robot cooperation, polishing, and locomotion. My approach to achieving this goal involves proposing controller algorithms that enable robots to be compliant and passive during close interactions with humans and the environment, while also ensuring high performance. To achieve this, I use a combination of impedance control and passivity-based control techniques, which allow the robots to interact with uncertain environments within certain boundaries. The impedance control technique defines the relationship between the generated force by the robot and its location in its surrounding environment, while the passivity-based control ensures the safety and stability of the system by constraining the robot’s behavior within certain limits. During my MSc and PhD studies, I worked extensively with various stationary-based and mobile-based robots, including the 7-DoF KUKA LWR 3 and Franka Emika. I evaluated my proposed algorithms using these robots and demonstrated their effectiveness in different scenarios. Although specific applications like medical robotics have seen significant improvement, a general control framework is still needed to improve interaction robustness and motion dynamics. Thus, my research is aimed at developing a general control framework that can be applied to different robotic platforms and scenarios, making robots more adaptable and reliable in a wide range of applications.

Google scholar / Linkedin / Github / Youtube
Recent Work
Work Experience
Research Associate and Entrepreneurship Fellow University of Edinburgh (2021 - present)
Projects
- Harmony EU-H2020 - Enhancing healthcare with assistive robotic mobile manipulation:
- Developing robust and compliant whole-body motion planning and control for interacting with unknown objects
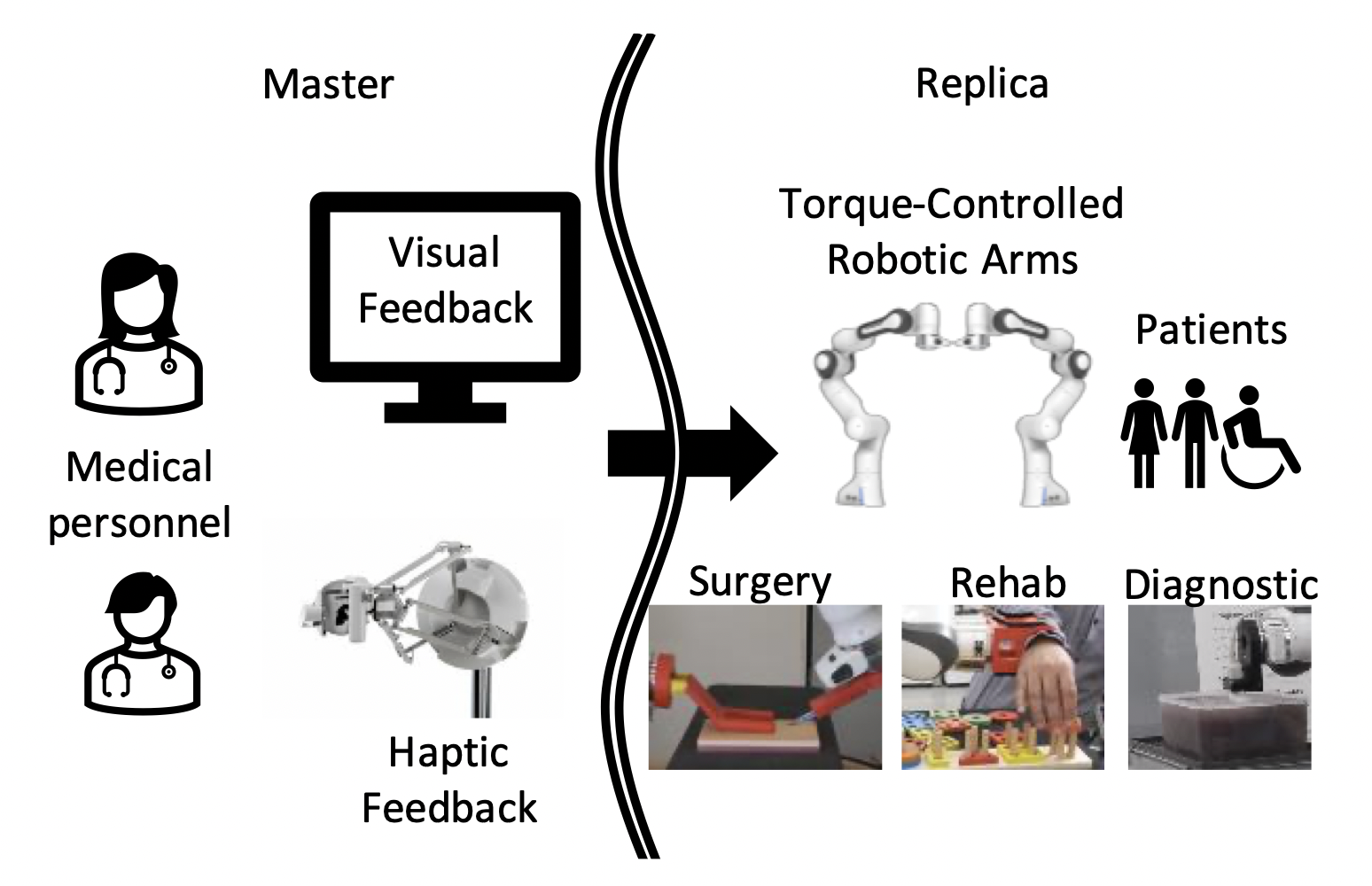
- THING EU-H2020 - subTerranean Haptic INvestiGator:
- Developing bilateral tele-manipulation control algorithms for human-robot tele-cooperation using single-arm and dual-arm manipulators in non-ideal control conditions
- CogIMon EU-H2020 - Cognitive Interaction in Motion:
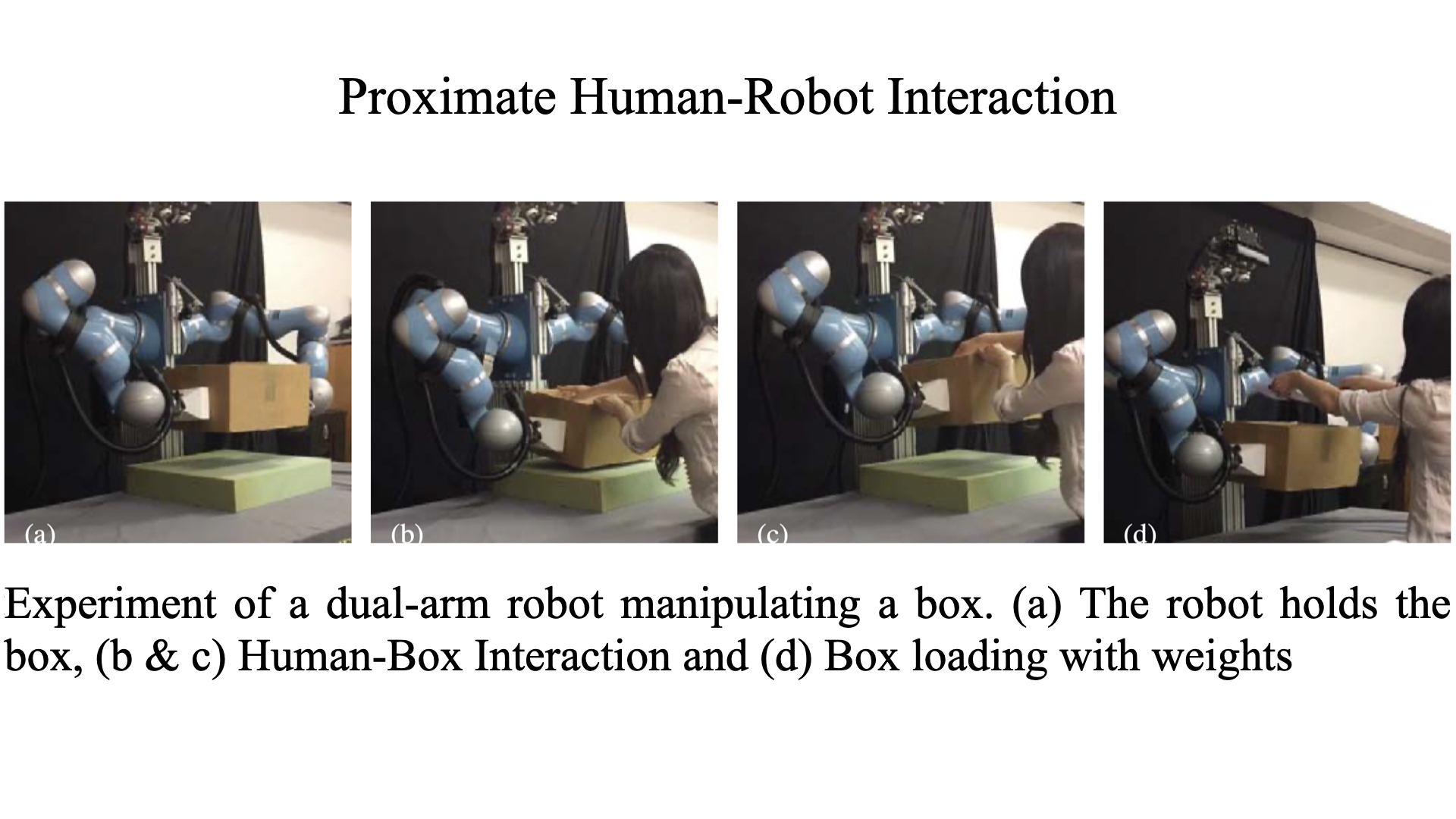
- Carrying out extensive research and proposing control algorithms for proximate human-robot interaction/collaboration/cooperation using single-arm and dual-arm manipulators for real-world robotic applications
Activities
IPAB (Institute of Perception, Action and Behaviour) - Student Representative University of Edinburgh (2019 - 2021)
SSLC (Staff Student Liaison Committee) - Student Representative University of Edinburgh (2019 - 2021)
Teaching Support Provider University of Edinburgh (2017 - 2021)
BARC (Birmingham Autonomous Robotic Club) - Robotic Software Engineer Uniersity of Birmingham (2014 - 2015)
Robotics Entrepreneurship Innovations
1) Development of Advanced Safety Protocols for Human-Robot Interaction:
- Concept: This involves creating a set of guidelines and technologies (like proximity sensors, AI algorithms for predictive behavior, and emergency stop mechanisms) that ensure human-robot interactions are safe, especially in shared workspaces.
- Market Need: As industries increasingly adopt automation, there’s a growing demand for safety protocols to prevent accidents. This is particularly pertinent in sectors like manufacturing, logistics, and warehousing, where the integration of robots is rapidly expanding.
- Opportunity: The increasing emphasis on workplace safety regulations globally provides a strong market for advanced safety solutions in robotics.
Business Plan
Business Concept
1) Business Concept
- Overview: The proposed company, SafeBot Solutions, aims to develop and implement advanced safety protocols for human-robot interaction in industrial settings. Our solutions will encompass state-of-the-art technologies such as proximity sensors, AI algorithms for predictive behavior, and emergency stop mechanisms to ensure the highest levels of safety in shared human-robot workspaces.
- Vision: To be the leading provider of comprehensive safety solutions that facilitate seamless and secure human-robot collaboration across various industries.
- Mission: To innovate and deliver cutting-edge safety protocols and technologies that prevent accidents and enhance productivity in workplaces integrating robotic systems.
Market Analysis
2) Market Analysis
- Industry Overview: The global industrial robotics market is growing rapidly, with an increasing number of industries adopting automation to improve efficiency and reduce costs. This growth is accompanied by a rising demand for robust safety measures to protect human workers.
- Target Market:
- Manufacturing: Automotive, electronics, and precision engineering sectors where robots are widely used.
- Logistics and Warehousing: Facilities employing robots for tasks like sorting, packing, and inventory management.
- Healthcare: Medical facilities using robots for patient care and surgical assistance.
- Market Needs:
- Enhanced safety protocols to prevent accidents in environments where humans and robots interact.
- Compliance with stringent workplace safety regulations.
- Solutions that can be easily integrated into existing robotic systems.
- Competitive Landscape: Current competitors primarily offer basic safety features. Our competitive advantage lies in integrating advanced AI and predictive algorithms to provide superior safety solutions.
Product Development Plan
3) Product Development Plan
- Product Features:
- Proximity Sensors: To detect human presence and maintain safe distances.
- AI Algorithms: For predictive behavior analysis to anticipate potential safety breaches.
- Emergency Stop Mechanisms: Instantly halting robot operations in case of an emergency.
- User-Friendly Interface: Simplifying the integration and monitoring of safety protocols.
- Development Phases:
- 1) Research and Development: Conduct thorough research on existing safety technologies and identify areas for innovation. Develop initial prototypes and test in controlled environments.
- 2) Pilot Testing: Implement prototypes in selected industrial settings to gather real-world data and feedback.
- 3) Product Refinement: Based on pilot testing results, refine and optimize the safety solutions.
- 4) Commercial Launch: Launch the final product to the market, accompanied by comprehensive user training and support.
Operational Strategy
4) Operational Strategy
- Operational Plan:
- R&D Team: Comprising experts in robotics, AI, and safety engineering.
- Manufacturing: Partnering with established manufacturers for the production of hardware components.
- Quality Assurance: Implementing rigorous testing protocols to ensure product reliability and safety.
- Customer Support: Offering 24/7 support services to assist clients with integration and troubleshooting.
- Key Milestones:
- Completion of R&D phase within 12 months.
- Pilot testing in 3 different industrial settings within 18 months.
- Commercial launch by the end of 24 months.
Financial Projections
5) Financial Projections
- Revenue Streams:
- Sales of safety protocol systems.
- Subscription-based software updates and maintenance.
- Consultancy services for customized safety solutions.
Marketing Strategy
6) Marketing Strategy
- Marketing Objectives:
- Build brand awareness in target industries.
- Establish SafeBot Solutions as a thought leader in robotics safety.
- Generate leads and convert them into sales.
- Marketing Tactics:
- Content Marketing: Publish whitepapers, case studies, and blog posts on robotics safety.
- Industry Partnerships: Collaborate with industry associations and attend trade shows and conferences.
- Digital Marketing: Utilize SEO, PPC, and social media marketing to reach potential customers.
- Direct Sales: Employ a dedicated sales team to engage with potential clients and provide personalized demonstrations.
- Customer Retention:
- Offer comprehensive training and support to ensure customer satisfaction.
- Regularly update the product with new features and improvements based on customer feedback.
2) Customizable Human-Robot Collaboration Systems:
- Concept: Designing robots capable of learning and adapting to human workers’ styles and behaviors. These systems would use machine learning and sensor data to modify their actions for more effective collaboration.
- Market Need: In sectors like automotive manufacturing, electronics, and precision engineering, there’s a demand for robotic systems that can adapt to varied and changing tasks, while working in tandem with human workers.
- Opportunity: With the rise of customized production and flexible manufacturing lines, adaptable robotic systems are increasingly valuable.
Business Plan
Business Concept
1) Business Concept
- Overview: The proposed company, FlexiCollab Robotics, aims to design and develop robots capable of learning and adapting to human workers' styles and behaviors. By leveraging machine learning and sensor data, our robots will modify their actions to enhance human-robot collaboration in various industrial settings.
- Vision: To be the leading provider of adaptive robotic solutions that seamlessly integrate with human workflows, maximizing efficiency and productivity.
- Mission: To innovate and deliver cutting-edge, customizable robotic systems that enhance the capabilities of human workers through effective collaboration.
Market Analysis
2) Market Analysis
- Industry Overview: The industrial robotics market is rapidly expanding as automation becomes a critical component of manufacturing and other sectors. The need for robots that can adapt to dynamic human tasks is increasing, particularly in industries with complex and variable processes.
- Target Market:
- Automotive Manufacturing: High demand for robots that can work alongside humans in assembly lines.
- Electronics: Precision tasks that require adaptable robotic systems.
- Precision Engineering: Customizable robots to assist in detailed and intricate tasks.
- Market Needs:
- Flexible robotic systems that can quickly adapt to changing tasks.
- Enhanced collaboration between human workers and robots.
- Improved productivity and efficiency in manufacturing processes.
- Competitive Landscape: Existing solutions often involve rigid, pre-programmed robots. Our competitive advantage is the ability to provide adaptive, learning-based systems that offer greater flexibility and efficiency.
Product Development Plan
3) Product Development Plan
- Product Features:
- Machine Learning Capabilities: Robots that learn from human actions and adapt their behavior accordingly.
- Advanced Sensors: To capture detailed data about the environment and human movements.
- User-Friendly Programming Interface: Allowing easy customization and integration of robots into existing workflows.
- Real-Time Adaptation: Robots can adjust their actions in real-time based on sensor data and machine learning algorithms.
- Development Phases:
- 1) Research and Development: Develop initial prototypes with machine learning and sensor integration.
- 2) Pilot Testing: Deploy prototypes in selected industries to gather data and feedback.
- 3) Product Refinement: Enhance the product based on pilot testing results.
- 4) Commercial Launch: Roll out the final product with comprehensive training and support services.
Operational Strategy
4) Operational Strategy
- Operational Plan:
- R&D Team: Comprising experts in robotics, machine learning, and human-computer interaction.
- Manufacturing: Partnering with established manufacturers for hardware production.
- Quality Assurance: Implementing rigorous testing protocols to ensure product reliability and performance.
- Customer Support: Offering 24/7 support to assist clients with integration and troubleshooting.
- Key Milestones:
- Completion of R&D phase within 12 months.
- Pilot testing in 3 different industrial settings within 18 months.
- Commercial launch by the end of 24 months.
Financial Projections
5) Financial Projections
- Revenue Streams:
- Sales of customizable robotic systems.
- Subscription-based software updates and maintenance.
- Consultancy services for tailored integration solutions.
Marketing Strategy
6) Marketing Strategy
- Marketing Objectives:
- Build brand recognition in target industries.
- Position FlexiCollab Robotics as a leader in adaptive robotic solutions.
- Drive sales through targeted marketing efforts.
- Marketing Tactics:
- Content Marketing: Publish whitepapers, case studies, and blog posts on adaptive robotics and human-robot collaboration.
- Industry Partnerships: Collaborate with industry associations and participate in trade shows and conferences.
- Digital Marketing: Utilize SEO, PPC, and social media marketing to reach potential customers.
- Direct Sales: Employ a dedicated sales team to engage with potential clients and provide personalized demonstrations.
- Customer Retention:
- Provide comprehensive training and support to ensure customer satisfaction.
- Regularly update the product with new features and improvements based on customer feedback.
3) Robotics Training and Simulation Software:
- Concept: Developing immersive training programs using VR/AR to simulate realistic human-robot interaction scenarios. This software would train users in operating and collaborating with robots safely and efficiently.
- Market Need: There’s a growing need for skilled workers in robotics operation and maintenance, especially in industries transitioning towards automation.
- Opportunity: The educational sector, vocational training institutions, and industrial companies looking to upskill their workforce are potential markets.
Business Plan
Business Concept
1) Business Concept
- Overview: The proposed company, RoboSimTech, aims to develop immersive training programs using Virtual Reality (VR) and Augmented Reality (AR) to simulate realistic human-robot interaction scenarios. This software will train users to operate and collaborate with robots safely and efficiently.
- Vision: To become the leading provider of innovative and immersive training solutions that equip workers with the skills necessary for effective human-robot collaboration.
- Mission: To create state-of-the-art VR/AR training software that enhances the competency and safety of workers in industries transitioning towards automation.
Market Analysis
2) Market Analysis
- Industry Overview: With the rapid adoption of automation, there is an increasing need for skilled workers who can effectively operate and collaborate with robots. The global VR/AR market is also growing, providing an excellent opportunity for immersive training solutions.
- Target Market:
- Manufacturing: Companies implementing robots in their production lines.
- Logistics and Warehousing: Facilities employing robots for tasks such as sorting, packing, and inventory management.
- Educational Sector: Vocational training institutions and universities offering courses in robotics and automation.
- Market Needs:
- Effective training solutions to upskill workers in operating and maintaining robots.
- Immersive and interactive training experiences to enhance learning outcomes.
- Solutions that can be easily integrated into existing training programs.
- Competitive Landscape: Current training solutions are often limited to traditional methods such as manuals and classroom instruction. Our competitive advantage is the use of immersive VR/AR technology to provide realistic and engaging training experiences.
Product Development Plan
3) Product Development Plan
- Product Features:
- Immersive VR/AR Scenarios: Realistic simulations of human-robot interactions in various industrial settings.
- Interactive Training Modules: Hands-on training exercises to teach users how to operate and collaborate with robots.
- Performance Tracking: Analytics and feedback to monitor progress and identify areas for improvement.
- Customizable Content: Tailored training modules to meet the specific needs of different industries.
- Development Phases:
- 1) Research and Development: Develop initial VR/AR prototypes and training modules.
- 2) Pilot Testing: Implement prototypes in selected training programs to gather feedback.
- 3) Product Refinement: Enhance the product based on pilot testing results.
- 4) Commercial Launch: Roll out the final product with comprehensive support and training services.
Operational Strategy
4) Operational Strategy
- Operational Plan:
- R&D Team: Comprising experts in VR/AR technology, robotics, and instructional design.
- Software Development: Partnering with VR/AR developers for content creation and software development.
- Quality Assurance: Implementing rigorous testing protocols to ensure product reliability and effectiveness.
- Customer Support: Offering 24/7 support to assist clients with integration and troubleshooting.
- Key Milestones:
- Completion of R&D phase within 12 months.
- Pilot testing in 3 different training programs within 18 months.
- Commercial launch by the end of 24 months.
Financial Projections
5) Financial Projections
- Revenue Streams:
- Sales of VR/AR training software licenses.
- Subscription-based updates and maintenance.
- Custom content development and consultancy services.
Marketing Strategy
6) Marketing Strategy
- Marketing Objectives:
- Build brand recognition in the target industries.
- Establish RoboSimTech as a leader in VR/AR training solutions for robotics.
- Drive sales through targeted marketing efforts.
- Marketing Tactics:
- Content Marketing: Publish whitepapers, case studies, and blog posts on the benefits of VR/AR training in robotics.
- Industry Partnerships: Collaborate with industry associations and participate in trade shows and conferences.
- Digital Marketing: Utilize SEO, PPC, and social media marketing to reach potential customers.
- Direct Sales: Employ a dedicated sales team to engage with potential clients and provide personalized demonstrations.
- Customer Retention:
- Provide comprehensive training and support to ensure customer satisfaction.
- Regularly update the product with new features and improvements based on customer feedback.
4) Safety-Enhanced Robotic Solutions for Healthcare:
- Concept: Creating robots specifically designed to assist in healthcare settings, equipped with features for patient safety, precision tasks, and hygiene compliance.
- Market Need: The healthcare sector is increasingly interested in employing robots for tasks like surgical assistance, patient care, and sanitation, particularly given the challenges of aging populations and labor shortages.
- Opportunity: This area has potential for significant growth due to the rising demand for healthcare services and the need for technological advancements in patient care.
Business Plan
Business Concept
1) Business Concept
- Overview: The proposed company, MedSafe Robotics, aims to develop robots specifically designed for healthcare settings, equipped with features that prioritize patient safety, precision tasks, and hygiene compliance. These robots will assist in various healthcare applications, such as surgical assistance, patient care, and sanitation.
- Vision: To be the leading provider of innovative robotic solutions that enhance patient safety and care quality in healthcare settings.
- Mission: To design and deliver state-of-the-art robotic systems that support healthcare professionals by improving safety, efficiency, and hygiene standards in medical environments.
Market Analysis
2) Market Analysis
- Industry Overview: The healthcare industry is increasingly adopting automation to address challenges such as labor shortages, the need for precision in medical procedures, and maintaining high standards of hygiene. The global market for medical robots is growing, driven by technological advancements and the rising demand for healthcare services.
- Target Market:
- Hospitals and Clinics: Facilities requiring advanced robotic solutions for surgical assistance and patient care.
- Long-Term Care Facilities: Institutions seeking robotic aids for elderly care and sanitation.
- Surgical Centers: Specializing in precision and minimally invasive surgeries.
- Market Needs:
- Enhanced safety features to protect patients and healthcare workers.
- Precision in performing medical tasks.
- High standards of hygiene to prevent infections.
- Solutions that can address labor shortages and improve operational efficiency.
- Competitive Landscape: Current solutions include basic robotic aids and surgical robots with limited safety and hygiene features. Our competitive advantage lies in integrating advanced safety and hygiene compliance features into our robotic systems.
Product Development Plan
3) Product Development Plan
- Product Features:
- Safety Mechanisms: Proximity sensors, AI-based predictive behavior analysis, and emergency stop functions to ensure patient safety.
- Precision Tools: Advanced instruments for tasks such as surgery and patient care, ensuring high accuracy and minimal invasiveness.
- Hygiene Compliance: Materials and designs that facilitate easy cleaning and sterilization, along with built-in sanitation features.
- User-Friendly Interface: Intuitive controls for healthcare professionals to operate and interact with the robots seamlessly.
- Development Phases:
- 1) Research and Development: Develop initial prototypes with a focus on safety, precision, and hygiene.
- 2) Pilot Testing: Implement prototypes in selected healthcare settings to gather feedback and data.
- 3) Product Refinement: Enhance the product based on pilot testing results.
- 4) Commercial Launch: Roll out the final product with comprehensive training and support services.
Operational Strategy
4) Operational Strategy
- Operational Plan:
- R&D Team: Comprising experts in robotics, healthcare, and safety engineering.
- Manufacturing: Partnering with established manufacturers for hardware production.
- Quality Assurance: Implementing rigorous testing protocols to ensure product reliability and safety.
- Customer Support: Offering 24/7 support to assist clients with integration and troubleshooting.
- Key Milestones:
- Completion of R&D phase within 12 months.
- Pilot testing in 3 different healthcare settings within 18 months.
- Commercial launch by the end of 24 months.
Financial Projections
5) Financial Projections
- Revenue Streams:
- Sales of safety-enhanced robotic systems.
- Subscription-based updates and maintenance.
- Custom solutions and consultancy services.
Marketing Strategy
6) Marketing Strategy
- Marketing Objectives:
- Build brand recognition in the healthcare industry.
- Position MedSafe Robotics as a leader in safety-enhanced robotic solutions.
- Drive sales through targeted marketing efforts.
- Marketing Tactics:
- Content Marketing: Publish whitepapers, case studies, and blog posts on the benefits of robotic solutions in healthcare.
- Industry Partnerships: Collaborate with healthcare associations and participate in medical conferences and trade shows.
- Digital Marketing: Utilize SEO, PPC, and social media marketing to reach potential customers.
- Direct Sales: Employ a dedicated sales team to engage with potential clients and provide personalized demonstrations.
- Customer Retention:
- Provide comprehensive training and support to ensure customer satisfaction.
- Regularly update the product with new features and improvements based on customer feedback.
5) Consultancy Services for Robotic System Integration:
- Concept: Providing expert guidance on integrating robotic systems into business processes, including planning, implementation, and training for safe and effective human-robot collaboration.
- Market Need: Many businesses, especially small and medium-sized enterprises (SMEs), lack the expertise to integrate robotics into their operations effectively.
- Opportunity: There’s a significant market in consultancy for companies looking to modernize their operations with robotics, especially in sectors like logistics, manufacturing, and agriculture.
Business Plan
Business Concept
1) Business Concept
- Overview: The proposed company, RoboIntegrate Solutions, aims to provide expert consultancy services for integrating robotic systems into business processes. Our services will include planning, implementation, and training for safe and effective human-robot collaboration.
- Vision: To be the leading consultancy firm specializing in seamless and efficient robotic system integration for businesses of all sizes.
- Mission: To deliver comprehensive consultancy services that enable businesses to harness the full potential of robotic systems, enhancing their productivity and operational efficiency.
Market Analysis
2) Market Analysis
- Industry Overview: The adoption of robotics in various industries is accelerating, driven by the need for increased automation and efficiency. Many businesses, particularly small and medium-sized enterprises (SMEs), lack the expertise to integrate robotic systems effectively, creating a significant demand for consultancy services.
- Target Market:
- Manufacturing: Companies looking to integrate robotics into their production lines.
- Logistics and Warehousing: Facilities seeking to automate sorting, packing, and inventory management.
- Healthcare: Medical facilities implementing robotic solutions for patient care and surgical assistance.
- Market Needs:
- Expert guidance on selecting and implementing the right robotic systems.
- Training for staff to ensure safe and efficient operation of robotic systems.
- Strategies for seamless integration of robots into existing business processes.
- Competitive Landscape: Current consultancy services often lack specialization in robotics. Our competitive advantage lies in our deep expertise in robotic systems and human-robot collaboration, enabling us to offer tailored solutions that meet specific industry needs.
Product Development Plan
3) Product Development Plan
- Service Features:
- Consultation and Assessment: In-depth analysis of client needs and current processes to identify opportunities for robotic integration.
- System Design and Selection: Customized design of robotic solutions, including selecting the appropriate hardware and software.
- Implementation Support: Hands-on assistance during the installation and setup of robotic systems.
- Training Programs: Comprehensive training for staff on operating and maintaining robotic systems.
- Ongoing Support: Continuous support and updates to ensure optimal performance of robotic systems.
- Development Phases:
- 1) Service Development: Create detailed service offerings and develop training materials.
- 2) Pilot Projects: Implement pilot projects with selected clients to refine service offerings.
- 3) Service Launch: Roll out the full range of consultancy services to the market.
- 4) Expansion: Expand services to cover a wider range of industries and geographic areas.
Operational Strategy
4) Operational Strategy
- Operational Plan:
- Consultancy Team: Experts in robotics, industrial engineering, and project management.
- Training Specialists: Professionals with experience in teaching and training on robotic systems.
- Support Staff: Team dedicated to providing ongoing support and maintenance services.
- Partnerships: Collaborate with robotic manufacturers and software providers to offer comprehensive solutions.
- Key Milestones:
- Completion of service development within 6 months.
- Pilot projects with 3 different clients within 12 months.
- Full service launch by the end of 18 months.
- Geographic and industry expansion by the end of 24 months.
Financial Projections
5) Financial Projections
- Revenue Streams:
- Consultancy fees for assessment and planning services.
- Implementation fees for system setup and integration.
- Training program fees.
- Ongoing support and maintenance contracts.
Marketing Strategy
6) Marketing Strategy
- Marketing Objectives:
- Build brand recognition in the target industries.
- Establish RoboIntegrate Solutions as a leader in robotic system integration consultancy.
- Drive client acquisition through targeted marketing efforts.
- Marketing Tactics:
- Content Marketing: Publish whitepapers, case studies, and blog posts on successful robotic integrations and industry trends.
- Industry Partnerships: Collaborate with industry associations and participate in trade shows and conferences.
- Digital Marketing: Utilize SEO, PPC, and social media marketing to reach potential clients.
- Direct Sales: Employ a dedicated sales team to engage with potential clients and provide personalized consultancy demonstrations.
- Customer Retention:
- Provide exceptional service and support to ensure client satisfaction.
- Regularly update service offerings based on client feedback and industry developments.
- Develop long-term relationships through ongoing support and maintenance contracts.
Robotic Application - Warehouse Automation Case Study
Goal
Robot control software that can constrain the working environment of the robots which can guarantee safety when it comes to proximate- or remote Physical Human-Robot-Interaction (HRI).
Target
Warehouse companies where goods are required to get manipulated by human(s) so they can get sorted, packed, carried and etc., and robots can assist human(s) by sharing the same working environment by guaranteeing safety when it comes to Human-Robot-Collaboration so robot(s) can take care of the repetitive tedious tasks by assisting human(s) in daily warehouse chores.
Proposed Solution
The proposed and tested robot control (in research) can get implemented in existing various robot(s) in the warehouse to showcase the capability of the novel robot control and bring human(s) and robot(s) together to accomplish tasks. The proposed method is tested and gave promising results in both simulation (using simulated robot(s)) and real-world robot, and the work is also published by high-level journal(s) and conference(s).
The work is tested on mobile-base robots and robot manipulators and the results are as follows:
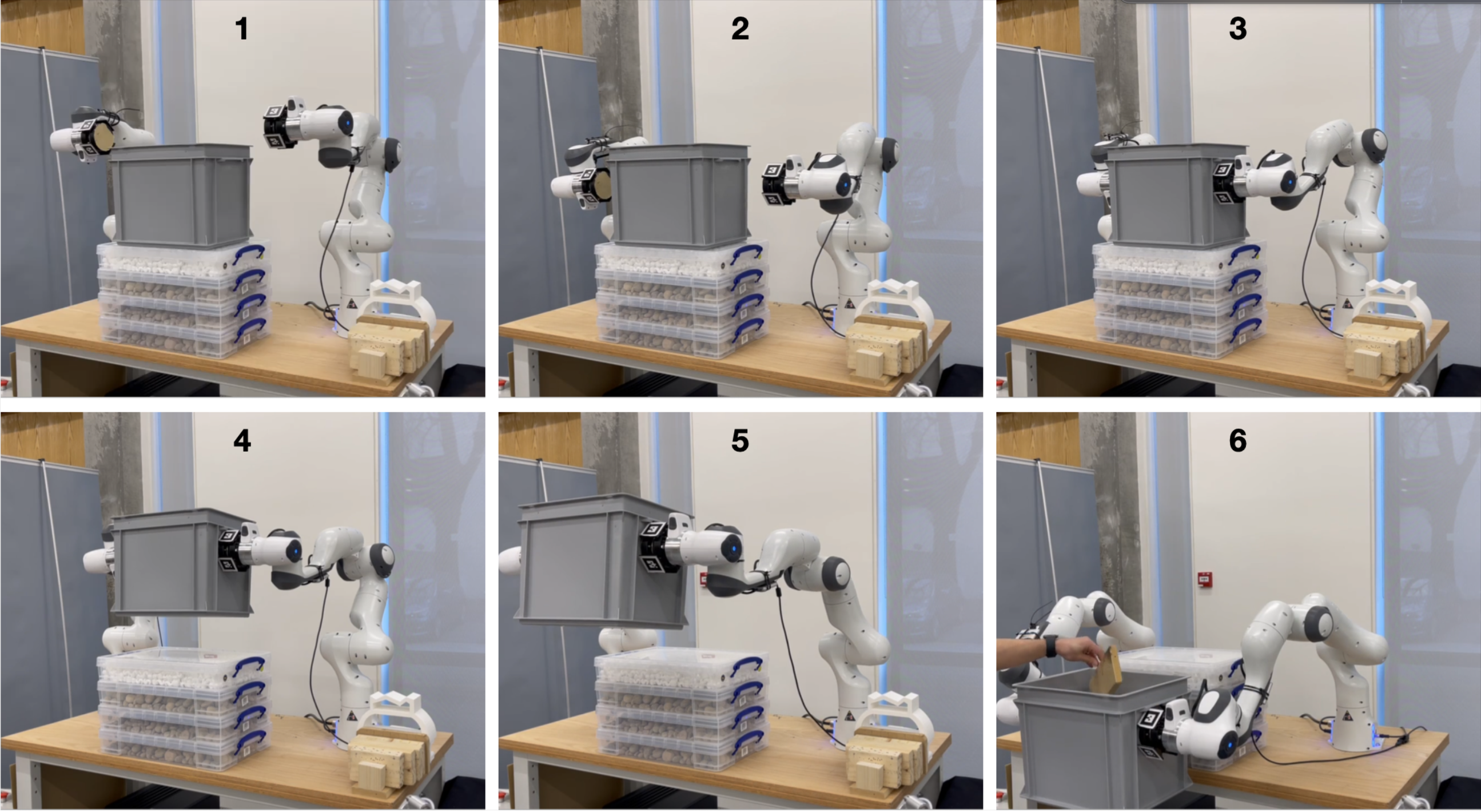
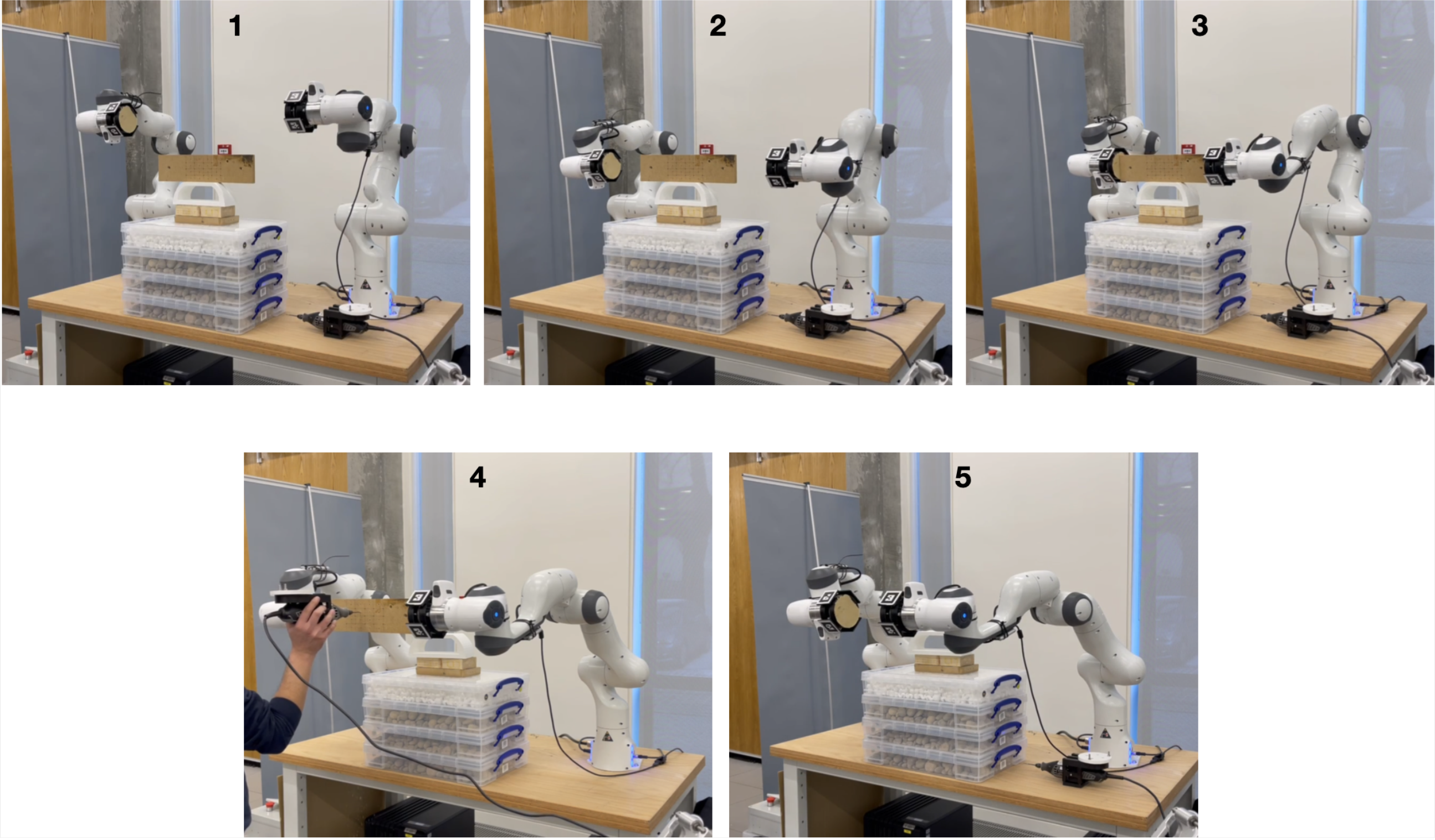
Scenario #1
The robots holding light/heavy object(s) for compliant and safe proximate human-robot interaction.
Dual-arm Heavy Object Manipulation and Human-Robot Interaction (HRI)
Dual-arm Light Object Manipulation and Human-Robot Cooperation (HRC)
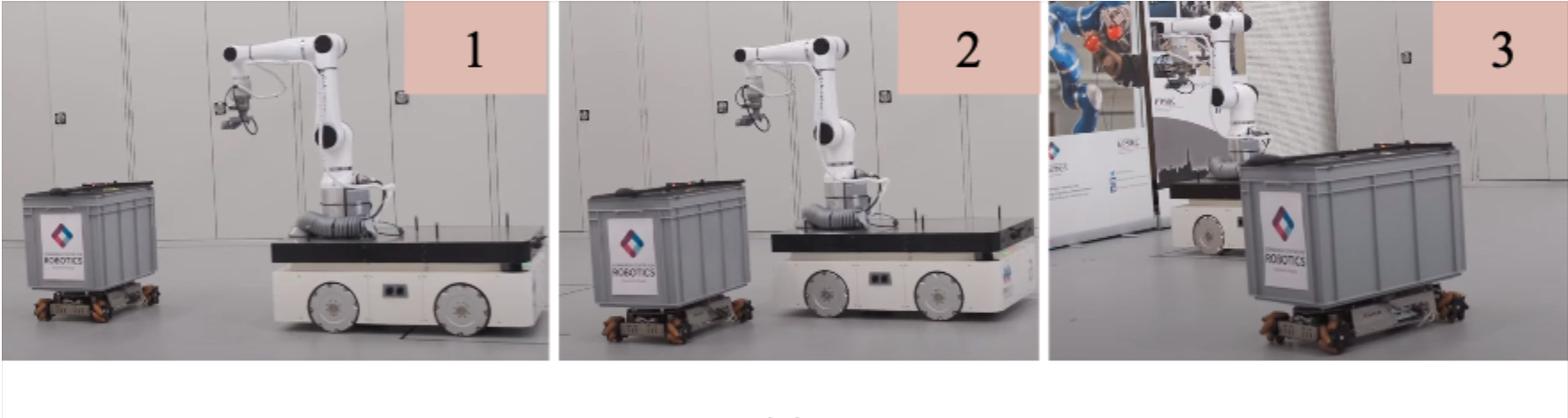
Scenario #2
Mobile-base Robot Navigation and Dynamic Obstacle Avoidance


Research and Publication
Contact
Dr. Keyhan Kouhkiloui Babarahmati
Bayes Centre - G1.10
47 Potterrow
Edinburgh
EH8 9BT
Email: kkouhkil[at]ed.ac.uk